

Με το εργαλείο Registration μπορούμε να εκτελέσουμε μετασχηματισμό του νέφους σημείων είτε χρησιμοποιώντας μετρημένα σταθερά σημεία (στόχους), είτε έχοντας ως σταθερό ένα άλλο νέφος σημείων (fixed points), που έχει μία μερική επικάλυψη με αυτό που θέλουμε να μετασχηματίσουμε (moving points).
Η εκκίνηση του εργαλείο γίνεται πατώντας  ,
όπου εμφανίζεται η παρακάτω φόρμα:
,
όπου εμφανίζεται η παρακάτω φόρμα:
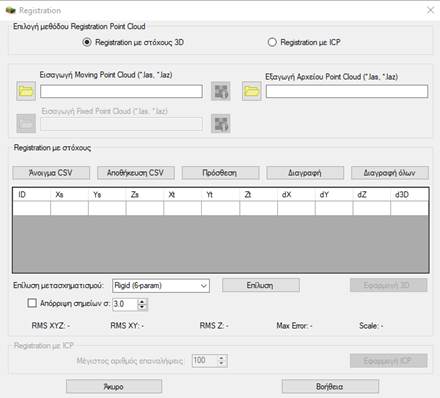
Αρχικά επιλέγουμε τη μέθοδο του Registration. Το DelSurvey διαθέτει 2 μεθόδους registration α) Registration βάση τους μετρημένους στόχους και β) με τη μέθοδο ICP (Iterative Closest Point).
- Registration με στόχους: Μετράμε τις συντεταγμένες των στόχων (Xs,Ys,Zs) στο νέφος σημείων και δίνουμε αντίστοιχα τις συντεταγμένες των στόχων Xt,Yt,Zt, όπως έχουν μετρηθεί από το όργανο (Lidar ή TotalStation), στον πίνακα που φαίνεται παρακάτω
Τις συντεταγμένες στο νέφος σημείων
μπορούμε να τις πάρουμε από τον Viewer Potree χρησιμοποιώντας το εργαλείο μέτρηση σημείου  και από το properties
βλέπουμε τις συντεταγμένες του στόχου στο νέφος σημείων.
και από το properties
βλέπουμε τις συντεταγμένες του στόχου στο νέφος σημείων. 

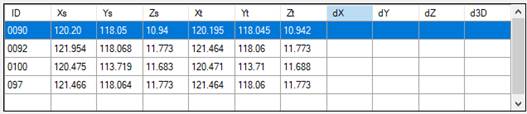
Κάνοντας copy
στο ![]() μπορούμε με δεξί κλικ στον πίνακα συντεταγμένων
να κάνουμε paste των συντεταγμένων του νέφους σημείων,
όπου αυτόματα τοποθετούνται στα κατάλληλα κελιά.
μπορούμε με δεξί κλικ στον πίνακα συντεταγμένων
να κάνουμε paste των συντεταγμένων του νέφους σημείων,
όπου αυτόματα τοποθετούνται στα κατάλληλα κελιά.
Για τον μετασχηματισμό του νέφους σημείων υπάρχουν 3 επιλογές, Rigit, Similarity, Affine. Πατώντας Επίλυση γίνεται η επίλυση του μοντέλου όπου βλέπουμε τα σφάλματα του μετασχηματισμού.
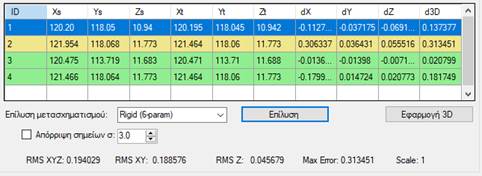
Εάν επιλέξουμε ![]() τότε θα απορριφθούν τα σημεία που έχουν RMS
μεγαλύτερο από 3*σ σφάλμα. Πατάμε Εφαρμογή 3D, όπου εκτελείται το Registration του Point cloud.
τότε θα απορριφθούν τα σημεία που έχουν RMS
μεγαλύτερο από 3*σ σφάλμα. Πατάμε Εφαρμογή 3D, όπου εκτελείται το Registration του Point cloud.
-Registration με ICP: χρησιμοποιεί τον αλγόριθμο Iterative Closest Point (Επαναληπτικό Πλησιέστερο Σημείο) για να υπολογίσει έναν στερεό μετασχηματισμό (περιστροφή και μετατόπιση) που ευθυγραμμίζει με τον βέλτιστο τρόπο δύο σύνολα δεδομένων. Η πρώτη είσοδος στο φίλτρο ICP θεωρείται ως τα "σταθερά" σημεία (fixed points), ενώ όλα τα επόμενα σημεία θεωρούνται "κινούμενα" (moving points). Εισάγουμε τα Fixed Point από το
![]()
Κατόπιν δίνουμε το μέγιστο αριθμό
επαναλήψεων ![]() και πατάμε Εφαρμογή ICP, όπου
εκτελείται το Registration του Point
cloud.
και πατάμε Εφαρμογή ICP, όπου
εκτελείται το Registration του Point
cloud.